3-DOF PID-Controlled Industrial Robotic Arm
⌄
Results at a glance
Electronics & Firmware
Led the 3-DOF + gripper robotic arm project and single-handedly developed the complete electronics and firmware control system.
Custom PID Control
Turned ordinary DC motors with encoders into precise stepper-like actuators using custom firmware PID algorithms for accurate joint positioning
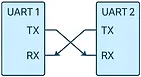
UART Command Protocol
Created real-time bidirectional protocol linking PIC16F18876 to Python kinematics and PC control interface.
Bare-Metal Firmware
All code and libraries written from scratch on PIC16F18876 — optimized for efficiency and reliability.
Overview
Led as technical team leader and solely responsible for the entire electronics and firmware architecture, this 3-DOF robotic arm with gripper showcases advanced embedded motor control and real-time system integration.
Using only a PIC16F18876 microcontroller and DC motors (no servos or steppers permitted), I designed and implemented PWM-driven H-bridge power stages, quadrature encoder feedback, and custom PID algorithms from scratch to achieve precise joint positioning and smooth motion. All firmware and supporting libraries were written bare-metal with strong emphasis on efficiency, reliability, and deterministic real-time performance.
I also created a custom UART command protocol that enabled seamless bidirectional communication with a Python-based PC application (developed by a teammate) handling direct and inverse kinematics plus a user-friendly control interface. An RGB LED system provides instant visual status for calibration, motion, idle, and error conditions.
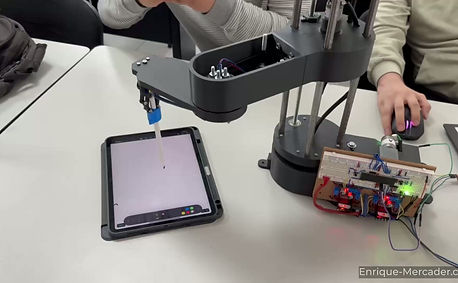
While a teammate handled the mechanical design, 3D printing, and physical assembly, my electronics and firmware formed the intelligent core that brought the complete system to life. The result was a highly functional robotic arm that demonstrated professional-level integration of embedded control, feedback systems, and cross-platform communication — skills directly transferable to industrial automation, robotics, and motion control applications.
Download Project Resources

All Code & Designs released under MIT License - For educations & non-commercial use